智驾网
44075 2025-01-07
1月6日,NVIDIA创始人兼首席执行官黄仁勋在 CES 上宣布 NVIDIA 正式推出用于合成运动生成的 NVIDIA Isaac GR00T Blueprint,该 Blueprint 可帮助开发者生成海量的合成运动数据,以便通过模仿学习来训练人形机器人。
官方表示,未来二十年,预计人形机器人市场将达到 380 亿美元。为了满足这一巨大需求,尤其是工业和制造业领域的需求,NVIDIA 发布了一系列机器人基础模型、数据管线和仿真框架,以加速下一代人形机器人的开发进程。
模仿学习是机器人学习的一个子集,它能让人形机器人通过观察和模仿人类专家的示范来获取新技能。在真实世界中收集这些广泛、高质量的数据集既繁琐又耗时,而且成本往往高得令人却步。通过用于合成运动生成的 Isaac GR00T Blueprint,开发者只需少量人类示范,就能轻松生成海量的合成数据集。
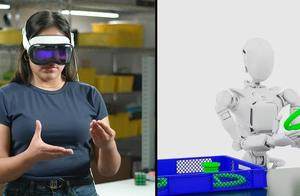
首先通过 GR00T-Teleop 工作流,用户可以借助 Apple Vision Pro 在数字孪生环境中捕捉人类动作。这些人类动作会被记录下来作为金标准,并在仿真环境中由机器人模仿学习。
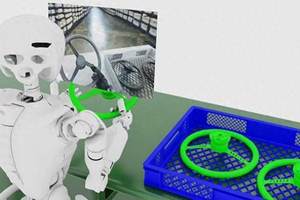
然后,GR00T-Mimic 工作流会将捕捉到的人类示范扩展成更大的合成运动数据集。最后,基于 NVIDIA Omniverse 和 NVIDIA Cosmos 平台构建的 GR00T-Gen 工作流,会通过域随机化和 3D 提升技术,指数级扩增这个数据集。
之后,该数据集可作为机器人策略的输入,在 NVIDIA Isaac Lab(一个用于机器人学习的开源模块化框架)中,教会机器人如何在其环境中高效且安全地移动和互动。
NVIDIA在 CES 上还发布了 Cosmos 平台,该平台拥有一系列开放的预训练世界基础模型,专为生成具有物理感知的视频和物理 AI 开发所需的世界状态而设计。它包含自回归模型和扩散模型,有各种模型尺寸并适用于多种输入数据格式。这些模型基于 1800 万亿个数据单元进行训练,其中包括 200 万小时的自动驾驶、机器人、无人机拍摄的视频以及合成数据。
除了帮助生成大型数据集外,Cosmos 还能通过将图像从 3D 扩展到真实场景,缩小仿真与现实之间的差距。将 Omniverse(一个用于构建 3D 应用程序和服务的应用程序编程接口和微服务开发平台)与 Cosmos 相结合至关重要,通过其高度可控、物理精确的仿真提供关键保障,有助于最大限度地减少世界模型常见的幻觉问题。
NVIDIA Isaac GR00T、Omniverse 和 Cosmos 正在助力物理 AI 和人形机器人创新实现巨大飞跃。包括波士顿动力和 Figure 在内的主要机器人公司已开始采用 Isaac GR00T,并展示了相关成果。
据介绍,人形机器人的软件、硬件制造商以及机器人厂商还可以申请提前加入 NVIDIA 的人形机器人开发者计划。
![]() 声明:本文由车市号作者撰写,仅代表个人观点,不代表网上车市。文中部分图片来源网络,感谢原作者。
声明:本文由车市号作者撰写,仅代表个人观点,不代表网上车市。文中部分图片来源网络,感谢原作者。
竟然没评论,快去评论~~

智驾传媒旗下拥有智驾网、智驾杂志和智驾新媒体,是中国首个关注汽车科技与智能发展的全媒体平台。